Industrielcommande
Documents taguées (242)
CONTRÔLE DIRECTE DU COUPLE PAR MODE GLISSANT D’UNE MACHINE Á INDUCTION Républiq
0
0

ROYAUME DU MAROC Office de la Formation Professionnelle et de la Promotion du T
0
0

ENSI Septembre 2006 Environnement Unix Support de cours Unix élaborer par: Dr.
0
0

ROYAUME DU MAROC Office de la Formation Professionnelle et de la Promotion du T
0
0
Le DOS Le DOS Une version du DOS est disponible dans le CDROM d’installation de
0
0
Commandes CMD : tout sur les commandes de Windows La plupart des experts en inf
0
0

Commandes CMD : tout sur les commandes de Windows La plupart des experts en inf
0
0

UNIVERSITE Mohamed Khider Biskra Faculté des Sciences et de la Technologie Dépa
0
0

Ministère de l’Enseignement Supérieur de la Recherche Scientifique et de Techno
0
0

REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE MINISTRE DE L’ENSEIGNEMENT SUPE
0
0

Toute reproduction sans autorisation du Centre français d’exploitation du droit
0
0

Commande des machines Tle F3 Lycée Technique de Santchou Dépolice OPPEPAMA PLET
0
0

République Tunisienne Ministère de l’Enseignement Supérieur et de la Recherche
0
0

Commande adaptative pdf Commande adaptative pdf Commande adaptative pdf Command
0
0
Aspects pratiques et théoriques 1 F. Malburet – Version 2011 Commandes Adaptati
0
0

REPUBLIQUE ALGERIENNE DEMOCRATIQUE ET POPULAIRE MINISTERE DE L’ENSEIGNEMENT SUP
0
0

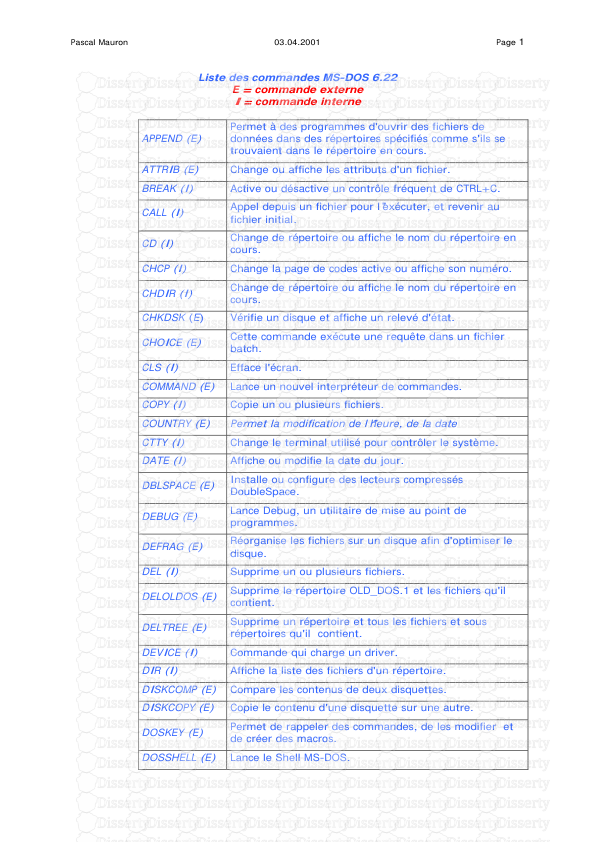
Pascal Mauron 03.04.2001 Page 1 Liste des commandes MS-DOS 6.22 E = commande ex
0
0
LES SYSTEMES AUTOMATISES I-LES SYSTEMES I.1. FONCTIONS GLOBALES D’UN SYSTEME La
0
0

Université Ibn Khaldoun Tiaret Faculté des Sciences Appliquées Département de G
0
0

Machines outils à commande numérique Dr : Zahia HESSAINIA Université Des Frères
0
0

UNIVERSITÉ DE TUNIS THESE EN GÉNI ÉLECTRIQUE en vue d’obtention du : présenté p
0
0

Université A. Mira-Bejaia M1 Automtismes Industiels Faculté de Technologie Modu
0
0

1 1- Généralités 1-1 Historique Les automates programmables industriels sont ap
0
0

1 1- Généralités 1-1 Historique Les automates programmables industriels sont ap
0
0
