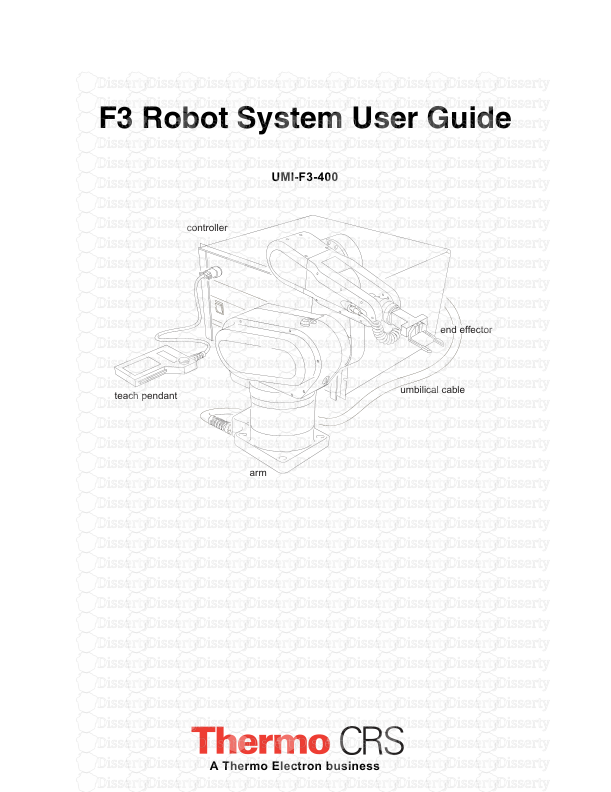

A Thermo Electron business controller teach pendant arm end effector umbilical
A Thermo Electron business controller teach pendant arm end effector umbilical cable F3 Robot System User Guide UMI-F3-400 ii Copyright © July 2002 Thermo CRS, Ltd. CataLyst, ActiveRobot, and RAPL are trademarks of Thermo CRS, Ltd. and may be used to describe only Thermo CRS, Ltd.. All brand names and product names used in this guide are trademarks, registered trademarks, or trade names of their respective holders. The information in this document is subject to change without notice. Thermo CRS, Ltd. makes no warranty of any kind with regard to this material, including, but not limited to, the implied warranties of merchantability and fitness for a particular purpose. Thermo CRS, Ltd. assumes no responsibility for any errors that may appear in this document. Thermo CRS, Ltd. makes no commitment to update nor to keep current the information contained in this document. Thermo CRS software products shall remain the property of Thermo CRS, Ltd. Additional copies of this guide, or other Thermo CRS literature, may be obtained from the Sales Department or from your distributor. Rev. Revision History Date 001 Original Issue 00-06 001a Updated with references to Robot Systems Software Documentation Guide 00-12 001b Includes new calibration file instructions 01-01 001c Corrected specifications. Missing figures restored. 01-05 001d Corrected SIO port numbering 01-08 002 Added serial port pinouts (Chapter 7) and revised firmware installation instructions (Appendix A). First version with both ActiveRobot and RAPL-3 (all Chapters). 01-12 002a Updated corporate logos and names. 02-07 F3 Robot System User Guide: Preface iii P R E F A C E About This Guide This user guide accompanies the Thermo CRS F3 articulated robot system. It contains installation instructions, specifications, and operating procedures for the F3 arm and C500C controller. Who Uses This Guide This installation guide is intended for users who have already attended a Thermo CRS robot system training course. It is not intended as a self-teaching tool. How to Use This Guide This manual is task-based and uses navigational aids to help you quickly find the topics and information you need. If a technical term is not familiar to you, refer to the Glossary. Before following instructions in a section, read the entire section first. This guide consists of the following chapters: • Chapter 1, Introducing the Robot System introduces the major components of your Thermo CRS robot system and provides an overview of system features. • Chapter 2, Technical Specifications contains physical and electrical specifications, including guidelines for the nominal use of your robot system. • Chapter 3, Safe Use of the F3 System discusses safety considerations. • Chapter 4, Installation provides instructions for installing the robot in a work cell. • Chapter 5, Commissioning the System explains how to load the calibration file, test basic robot functions and prepare your robot system for use. • Chapter 6, Basic Operations describes routine system procedures. • Chapter 7, System Connections includes detailed pinouts and configuration information to help you integrate additional devices into the work cell. Throughout this manual warnings are marked by a "!" symbol in the left margin. Failure to comply with these warnings can result in system errors, memory loss, damage to the robot and its surroundings, or injury to personnel. iv F3 Robot System User Guide: Preface Preface: Units Used in This Manual • Chapter 8, Maintenance Procedures describes how to establish a service schedule, lubricate joints, replace fuses, and perform other basic maintenance activities. • Chapter 9, Troubleshooting helps you to resolve common problem situations that you may encounter when using your robot system. • Appendix A, Installing New Firmware explains how to upgrade the CROS firmware on the controller. • Appendix B, GPIO Termination Block Option provides installation and mounting instructions for the optional GPIO termination block. Units Used in This Manual The F3 robot system is designed to metric scale. Throughout this manual, measurements are given in metric units. For More Information Additional information is available in the following documents, contained on your documentation CD: • Robot System Software Documentation Guide Guide for developing applications in an integrated way. • Application Shell (ASH) User Guide for the controller application shell. • CROS and System Shell User Guide for the controller system software. • ActiveRobot User Guide Reference Guide for the ActiveRobot application development software. • RAPL-3 Language Reference Guide Reference Guide for the RAPL-3 language. • Robcomm3 User Guide for the Robcomm3 application development tool for RAPL-3. You can obtain copies of these documents, or other Thermo CRS literature, from the Sales department or from your distributor. Training We offer courses at our facility in Burlington, Ontario Canada, or on-site at your facility. For more information, contact the Thermo CRS Training Department. Preface: For More Information F3 Robot System User Guide: Preface v Contacts Surface Mail/Shipping Thermo CRS, Ltd. 5344 John Lucas Drive Burlington, Ontario L7L 6A6 Canada Telephone 1-905-332-2000 (voice) 1-800-365-7587 (voice: toll free in Canada and United States) 1-905-332-1114 (facsimile) E-Mail Sales: sales@thermocrs.com Technical Services Group: support@thermocrs.com Training: training@thermocrs.com General: info@thermocrs.com World Wide Web www.thermocrs.com vi F3 Robot System User Guide: Preface Preface: For More Information F3 Robot System User Guide: Preface vii Preface: Contents Chapter 1: Introducing the Robot System . . . . . . . . . . . . . . . . . 1-1 The Arm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-2 The C500C Controller . . . . . . . . . . . . . . . . . . . . . . . . 1-3 E-Stops . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1-4 The Teach Pendant . . . . . . . . . . . . . . . . . . . . . . . . . . 1-5 Chapter 2: Technical Specifications . . . . . . . . . . . . . . . . . . . . . . 2-1 Physical Characteristics . . . . . . . . . . . . . . . . . . . . . . 2-1 Electrical Specifications . . . . . . . . . . . . . . . . . . . . . . 2-2 Operating Environment . . . . . . . . . . . . . . . . . . . . . . . 2-2 Joint Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . 2-3 System Options . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2-6 Chapter 3: Safe Use of the F3 System . . . . . . . . . . . . . . . . . . . . . 3-1 Safety Conformance . . . . . . . . . . . . . . . . . . . . . . . . . 3-1 Built-in Safety Features . . . . . . . . . . . . . . . . . . . . . . 3-2 Triggering an E-Stop . . . . . . . . . . . . . . . . . . . . . . . . . 3-2 Designing a Safe Workcell . . . . . . . . . . . . . . . . . . . . . 3-3 Accident Prevention . . . . . . . . . . . . . . . . . . . . . . . . . 3-7 Chapter 4: Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-1 Preparing a Mounting Platform for the Arm . . . . . . . . 4-1 Lifting the Arm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4-3 Securing the Arm to the Mounting Platform . . . . . . . 4-5 Lifting the Controller . . . . . . . . . . . . . . . . . . . . . . . . . 4-5 Installing the Controller Fuse Drawer . . . . . . . . . . . . 4-5 Mounting the Controller . . . . . . . . . uploads/s1/ f3-robot-system-user-guide.pdf
Documents similaires






-
110
-
0
-
0
Licence et utilisation
Gratuit pour un usage personnel Attribution requise- Détails
- Publié le Fev 20, 2022
- Catégorie Administration
- Langue French
- Taille du fichier 4.2159MB